矩阵方程求解&最小二乘法
矩阵方程的求解主要分为三类
- 超定矩阵方程,m>n,A,b已知
- 盲矩阵方程:b已知,A未知
- 欠定稀疏矩阵方程:m<n,A,b已知但x未知且稀疏
最小二乘法(LS)
普通最小二乘
考虑超定矩阵方程Ax=b,m>n,为了抵制误差对矩阵方程求解的影响,引入一校正向量△b,并用它去“扰动”有误差的数据向量b。我们的目标是,使校正项△b“尽可能小”
m>n时为超定方程
问题可以理解为使
的优化问题
对于秩亏缺$(rank(A)<n)$的超定方程,最小二乘解为
高斯马尔可夫定理
在参数估计理论中,称参数向量$\theta$的估计$\hat{\theta}$为无偏估计,若它的数学期望值等于真实的未知参数向量,即$E{\hat{\theta}}=\theta$。进一步地,如果一个无偏估计还具有最小方差,则称这一无偏估计为最优无偏估计。
类似地,对于数据向量b含有加性噪声或者扰动的超定方程A$\theta$= b+e,若最小二乘解$\theta_{LS}$的数学期望等于真实参数向量$\theta$,便称最小二乘解是无偏的。如果它还具有最小方差,则称最小二乘解是最优无偏的。
高斯马尔科夫定理指出了最优无偏解的条件,对于线性方程组
满足
当且仅当$rank(A)=n$时,最优无偏解为最小二乘解
LS解与最大似然解的等价性
若加性误差向量$e=[e_1,… ,e_m]^T$为独立同分布的复高斯随机向量,其概率密度函数为
所以在高斯马尔科夫条件下,矩阵方程的最大似然解等价于最小二乘解,但误差向量方程不同时,两者不相等
数据最小二乘(DLS)
与普通最小二乘不同,我们假定b无噪声,数据矩阵$A=A_0+E$有噪声,我们加入校正矩阵$\Delta A$对A进行校准
我们的问题变为
我们采用拉格朗日乘子法进行求解
代入约束条件
得到数据最小二乘
求导问题
x为一个列向量
- 行向量求偏导
- 列向量
- example
- 矩阵求导
Tikhonov 正则化方法
因为在真实问题中往往存在秩亏缺,所以在最小二乘的代价函数的基础上我们进行改进,加入了正则化参数,在神经网络的代价函数经常用到
这种使用$(A^HA+\lambda I)^{-1}$代替协方差矩阵的直接求逆$(A^HA)^{-1}$的方法常称为Tikhonov正则化(Tikhonov regularization),或简称正则化方法(regularized method)。
Tikhonov正则化方法的本质是:通过对秩亏缺的矩阵A 的协方差矩阵 $A^HA$ 的每一个对角元素加一个很小的扰动$\lambda$,使得奇异的协方差矩阵$A^HA$ 的求逆变成非奇异矩阵$(A^HA+\lambda I)$的求逆,从而大大改善求解秩亏缺矩阵方程 Ax = b 的数值稳定性。
反正则化去燥
显然,若数据矩阵A 满列秩,但存在误差或者噪声时,就需要采用与Tikhonov正则化相反的做法,对被噪声污染的协方差矩阵$A^HA$ 加一个很小的负扰动矩阵$-\lambda I$,
总体最小二乘(TLS)
在A,b同时存在误差的最小二乘方法
我们的约束优化问题转化为了
令
原方程转化为数据最下二乘问题
令
其奇异值分解为
总体最小二乘的解为
总体最小二乘的几何意义
和点到线的距离相似$ai^T$是矩阵的第i行,$b_i$是第i个元素,总体最小二乘的解$x{TLS}$是使
问题转化为了点集$(a_i,b_i)$到直线$b=ax$的最小距离平方和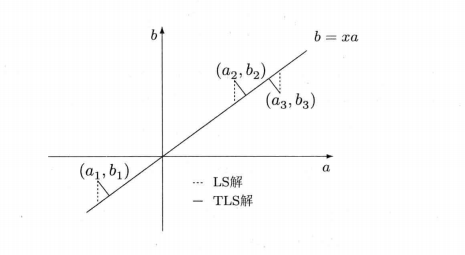
的极小化变量
总体最小二乘闭式解
若增广矩阵$B=[A ,b]$的奇异值为$\sigma1≥…\sigma{n+1}$,则总体最小二乘解可表示成
与Tikhonov 正则化比较知,总体最小二乘是一种反正则化方法,可以解释为一种具有噪声清除作用的最小二乘方法:先从协方差矩阵 $A^TA$中减去噪声影响项$\sigma_{n+1}^2I$,然后再矩阵求逆,得到最小二乘解。
四种最小二乘的比较
优化目标
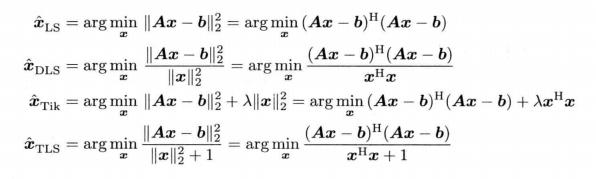
对应解
总体最小二乘拟合直线
普通最小二乘考虑拟合误差平方和最小化,对于直线$m(x-\bar x)+(y-\bar y)=0$,代价函数为
对于若干数据点集,我们用直线ax+by+c=0拟合,,总体最小二乘考虑数据点距离平方和的最小化
我们把D转化为单位向量t与M的乘积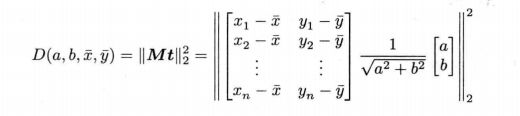
对此,我们有定理,单位法向量$t=(a^2+b^2)^{-1/2}[a,b]^T$取矩阵$M^tM$的最小特征值$\lambda{min}$对应的特征向量,距离平方和取最小值$\lambda{min}$
example
对于三个数据点(2,1),(2,4),(5,1)
所以法向量$t=[1/\sqrt{2},1/\sqrt{2}]^T$
得到拟合直线为
距离平方和为
如果采用普通最小二乘
平均约束的总体最小二乘
考虑存在于增广矩阵中的噪声矩阵
引入校正矩阵,矩阵中每个列向量都与向量u相关
我们的问题转化为了约束优化问题
W为加权矩阵,通常为对角矩阵,或者单位矩阵
