RL:model free
当模型太大,无法通过迭代得到最佳策略,我们就需要使用model free RL
Model-free prediction
Monre Carlo policy evaluation
- Return: $Gt=R{t+1}+\gamma R{t+2}+\gamma^2R{t+3}+…$ under policy$\pi$
- $v^\pi(s)=E_{\tau-\pi}[G_t|s_t = s]$, thus expectation over trajectories $\tau$Tgenerated by following $\pi$
- MC simulation: we can simply sample a lot of trajectories, computethe actual returns for all the trajectories, then average them
- MC policy evaluation uses empirical mean return instead of expectedreturn
- MC does not require MDP dynamics/rewards,no bootstrapping,anddoes not assume state is Markov.
- Only applied to episodic MDPs (each episode terminates)
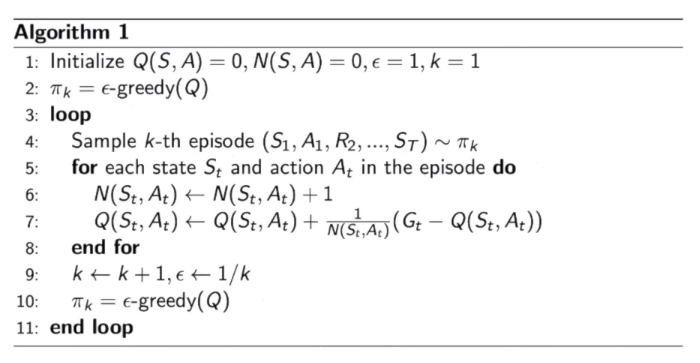
算法流程
To evaluate state v(s)
- Every time-step t that state s is visited in an episode,
- Increment counter $N(s)\to N(s)+1$
- Increment total return $S(s)\to S(s)+G_t$
- Value is estimated by mean return $v(s)= s(s)/N(s)$By law of large numbers,$v(s)\to v^\pi(s) $as$ N(s)\to \infty$
蒙特卡洛的核心思想是通过多次迭代,取每个状态value的均值
- Collect one episode (S1,A1,R1,…. St)
- For each state st with computed return Gt
- Or use a running mean (old episodes are forgotten). Good fornon-stationary problems.
$\alpha$在这里可以看做学习率
Temporal Diffenence learning
- Objective: learn $v_\pi$ online from experience under policy $\pi$
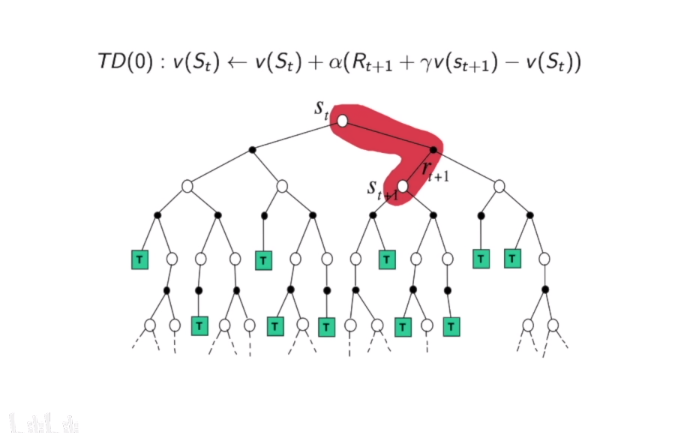
- Simplest TD algorithm: TD(0)
- Update $v(St)$ toward estimated retur$R{t+1}+~v(St+1)$
- $R{t+1}+\gamma v(S{t+1})$ is called TD target
- $t= R_{t+1}+\gamma v(S_t+1)- v(S_t)$ is called the TD error
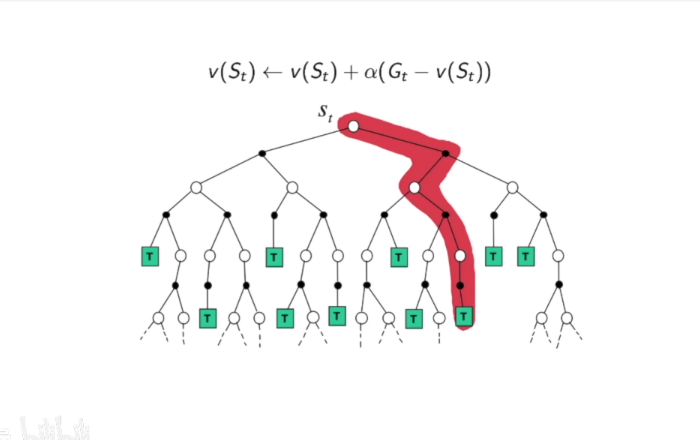
- Comparison: Incremental Monte-Carlo
- Update $v(S_t)$ toward actual return $G_t$ given an episode i我们也使用可以n步的TD
Difference Between TD and MC
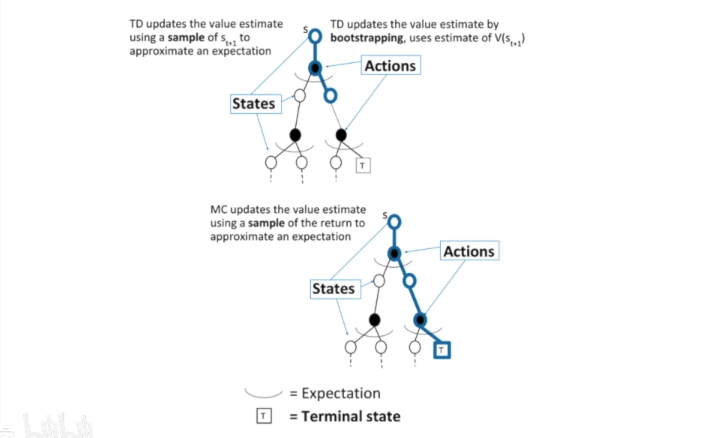
TD可以随时进行学习,MC只有在走完决策树后才能学习
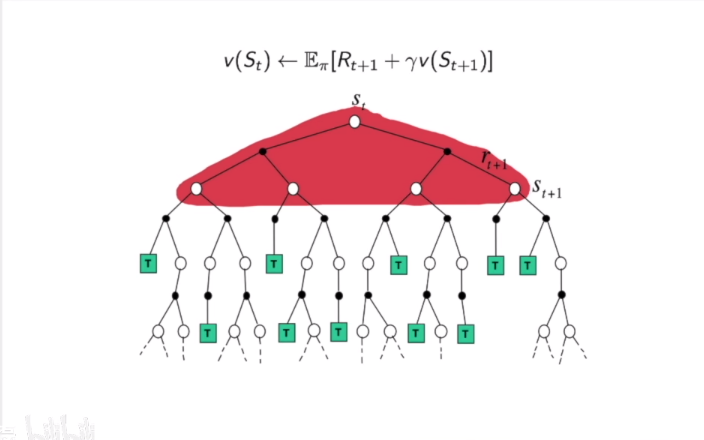
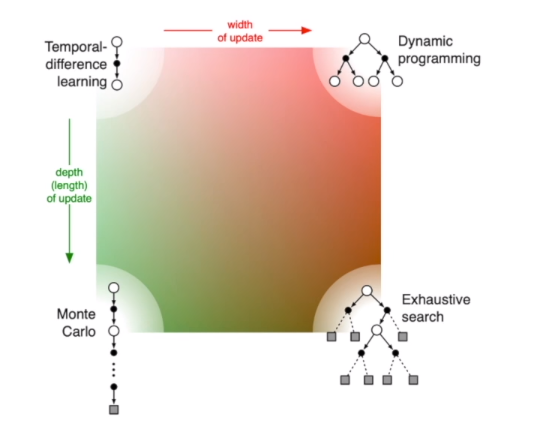
- DP
- MC
- TD
Model free control
Monte Carlo with $\epsilon$greedy Exploration
- Trade-off between exploration and exploitation (we will talk aboutthis in later lecture)
- $\epsilon$Greedy Exploration: Ensuring continual exploration
- All actions are tried with non-zero probability
- With probability 1 - $\epsilon$ choose the greedy action
- With probability $\epsilon$choose an action at random
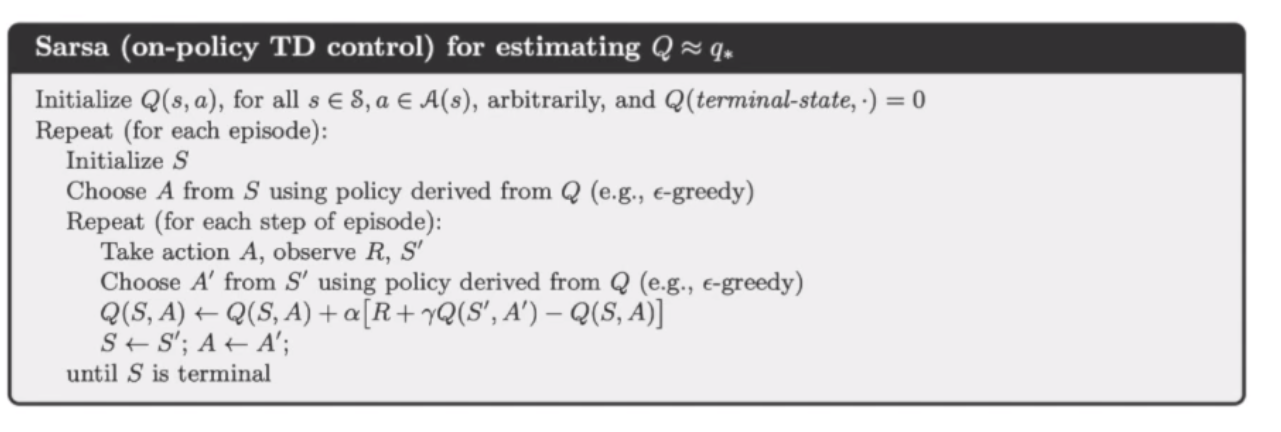
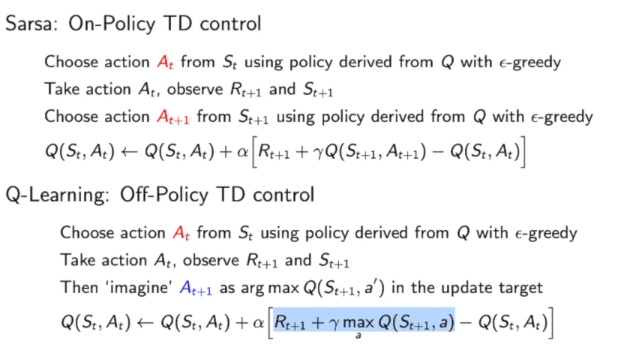
Sarsa:On-Policy TD Control
- An episode consists of an alternating sequence of states andstate-action pairs:
- $\epsilon$-greedy policy for one step, then bootstrap the action value function:
- The update is done after every transition from a nonterminal state $S_t$
- TD target $\phit= R{t+1}+Q(S{t+1},A{t+1})$
On policy Learning off-policy Learning
- On-policy learning: Learn about policy $\pi$ from the experiencecollected from $\pi$
- Behave non-optimally in order to explore all actions, then reduce the
exploration $\epsilon$-greedy
- Behave non-optimally in order to explore all actions, then reduce the
- Another important approach is off-policy learning which essentiallyuses two different polices:
- the one which is being learned about and becomes the optimal policy
- the other one which is more exploratory and is used to generate
trajectories
- Off-policy learning: Learn about policy $\pi$ from the experience sampledfrom another policy $\pi$
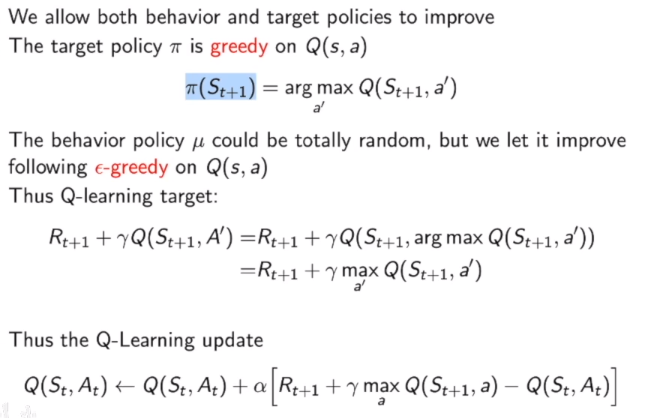
- $\pi$: target policy
- $\mu$: behavior policy
off policy 会选择更加激进的策略,通过激进策略的反馈优化target policy
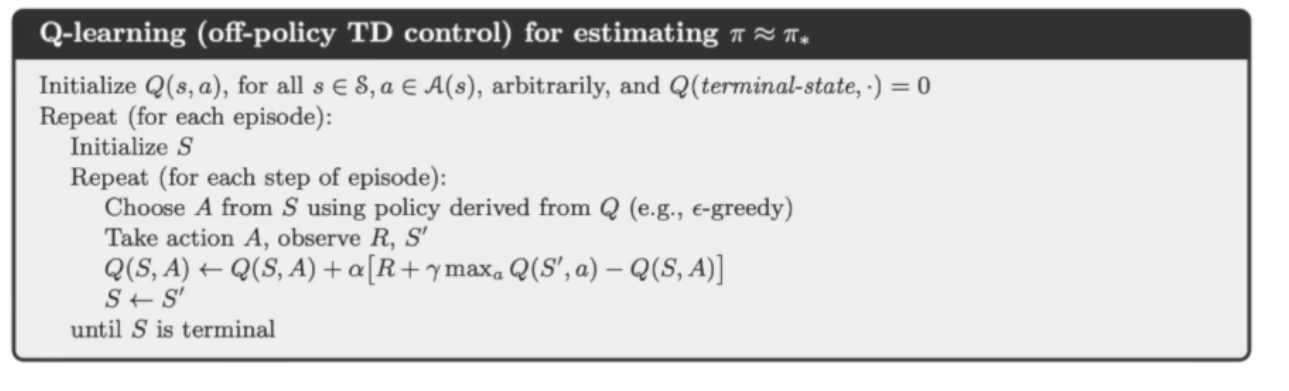
Off policy control with Q-Learning
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 摸黑干活!
相关推荐

评论